
Academic
Discrete Simulation, Technomatix
CSUN's MSE 603, Computer Integrated Manufacturing
Objectives: To build a model and hypothetically make some changes to the flow and assembly time.
Conclusion: After establishing a baseline and running few different scenarios, the results were significant by 13% improvement.
Further Improvement to make: Can make it more dynamic to include real world distractions/interruption, thus see the productivity differences.
Thank you for viewing, it was merely to display the ability to model a discrete simulation via Technomatix by Siemens.
For those of you that would like to read the report, feel free to read it! (~7 mins)
Articulated Arm Robot
CSUN's MSE 611, Robotics and Programmable Automation
Objectives: The project’s objective was to design and construct an articulated 6 Degrees of Freedom (DoF) robotic arm with the capabilities for both manual control and automated pick-and-place operations. It incorporated LED indicators to provide visual feedback on the robot’s current mode of operation, such as recording, data collection, and task execution.
Conclusion: The project culminated in the successful development of a 6 DoF robotic arm equipped with manual control via potentiometers and automated task functionalities. The addition of LED feedback mechanisms significantly enhanced the user interface, indicating the robot’s operational status effectively. This project achieved its goal of combining mechanical engineering and programming to create a foundational robotic system, setting the stage for future enhancements in robotics automation.
Further Improvement to make: Add computer vision as a feedback loop. Incorporating vision as a feedback mechanism allows the robot to adjust its actions based on the environment. This is a step towards more intelligent systems capable of learning and optimizing their operations over time.
For those of you that would like to read the report, feel free to read it! (~15 mins)
Note: The video has been updated to include automating pick and place. So that would not be in the report.
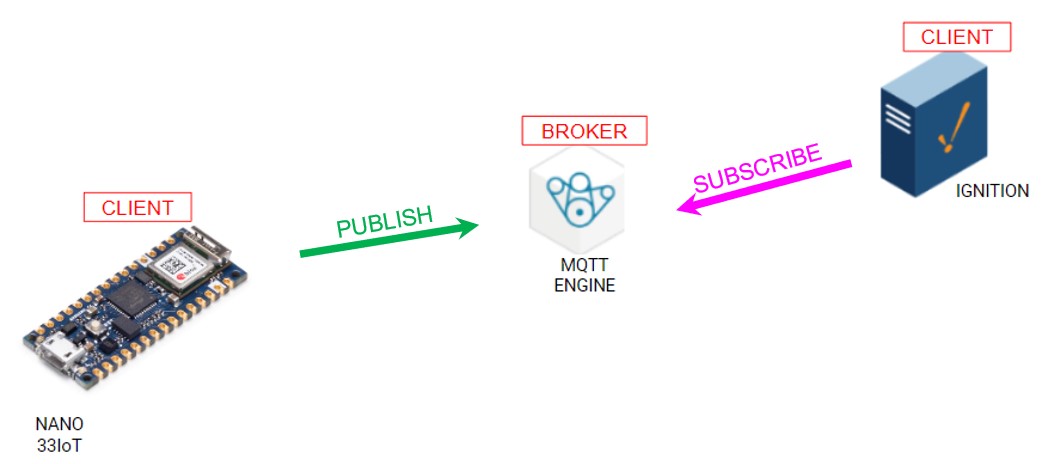
IoT, Interfacing with Ignition and Arduino
CSUN's MSE 614, Intelligent Manufacturing
Objectives: The aim was to establish a Digital Twin model, enabling the simulation of real-world processes by collecting and utilizing data from one client to influence operations in another, specifically focusing on visualizing control actions, like light toggling, through data read from an Arduino to Inductive Automation software.
Conclusion: The project successfully implemented a one-way data, see schematic, communication from Arduino to Inductive Automation, achieving real-time visualization of light states controlled via buttons. This underscores the feasibility and value of Digital Twins in Smart Manufacturing for real-world process simulation and control.
Further Improvement to make: Resolving the two-way communication challenge and progressing towards controlling complex systems such as Digital Twins of 6 DoF Robot.
{kind=link}
For those of you that would like to read the report, feel free to read it! (~17 mins)